�a(ch��n)Ʒ���
���T�YӍ
(li��n)ϵ�҂�/Contact Us
 ��ַ���Ϻ��з��t�^(q��)����(zh��n)�ǻ�·188̖1��
ꐽ�(j��ng)����15021366229
��ַ���Ϻ��з��t�^(q��)����(zh��n)�ǻ�·188̖1��
ꐽ�(j��ng)����15021366229 ꐽ�(j��ng)����18616962314
QQ��76667015
�W(w��ng)ַ:www.elegance-group.com.cn
Email:wzh@zhengchiyw.com
�ИI(y��)��
���ڄ�(d��ng)�B(t��i)ؓ(f��)���A(y��)�y��Ƥ��ݔ�͙C(j��)����ϵ�y(t��ng)
����Դ��http://www.elegance-group.com.cn �l(f��)���r(sh��)�g��2018-08-20 16:50 �g�[�Δ�(sh��)��
���ßo�ٶȂ�����ʸ�����Ƶķ���׃�l���c��������늙C(j��)��(g��u)�ɽ���׃�l�τ�(d��ng),��Ŀǰ���Ͼ���Ƥ��ݔ�͙C(j��)�τ�(d��ng)Ҫ���҃r(ji��)���m�е�����τ�(d��ng)�O(sh��)�䡣Ƥ��ݔ�͙C(j��)��ؓ(f��)�dһ�㶼�Dz��̶���,Ƥ���ĺ����\(y��n)�Е�(hu��)��ɘO������M(f��i)���e��ú�V,ú�Įa(ch��n)���ǘO�������,Ƥ���\(y��n)ݔϵ�y(t��ng)���\(y��n)ú��Ҳ�Dz������,��ؓ(f��)�d�^�p��oؓ(f��)�d�r(sh��),Ƥ��ݔ�͙C(j��)ϵ�y(t��ng)���{���\(y��n)�Ќ��C(j��)е����(d��ng)ϵ�y(t��ng)��ĥ�p���M(f��i)�^���(y��n)��,ͬ�r(sh��)�������Ҳ�ȵ����\(y��n)�Еr(sh��)��Ķ�,���Ҵ˕r(sh��)�C(j��)е����ܵ������ǟo�õ�
�����,�б�Ҫ�о��_�l(f��)Ƥ��ݔ�͙C(j��)���ܿ���ϵ�y(t��ng),��(sh��)�F(xi��n)Ƥ���C(j��)�Ԅ�(d��ng)�{(di��o)�����ܿ��ơ��@һ�о��ɳ�ְl(f��)�]�O(sh��)�䝓��,��ߵV���Ԅ�(d��ng)������ˮƽ,���ҿɴ��(ji��)�s���,ͬ�r(sh��)����Ƥ���\(y��n)ݔϵ�y(t��ng)���O(sh��)��p��,���L�O(sh��)���ʹ�É���
��
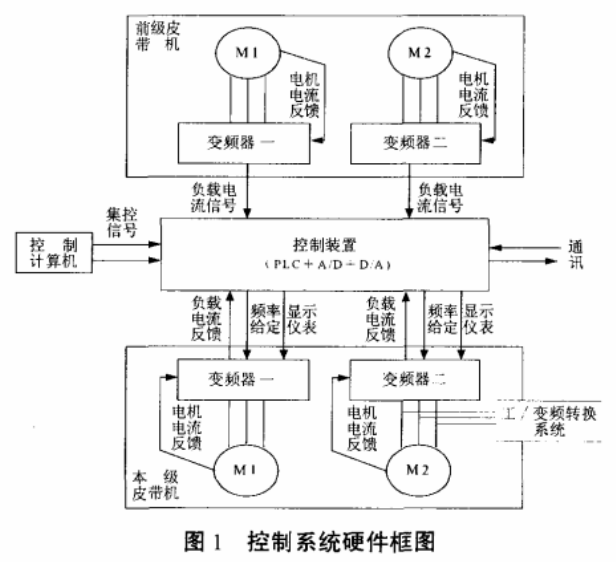
����ϵ�y(t��ng)Ӳ����(g��u)��
Ƥ��ݔ�͙C(j��)����ϵ�y(t��ng)��׃�l������(zh��)��늙C(j��)
�������b�ú�ؓ(f��)�d����z�y�ȽM��
�������b���ɿɾ���߉������PLC
��A/D��D/A�D(zhu��n)�Qģ�K�ȽM��,����׃�l���ɸ�������ǻ
�������Ӿ�ǻ����������ǻ
������|
����|
���ֺ�����|
�Ĵ�ʡ|
������|
��ɽ��|
��ɽ��|
�ڶ���|
���|
������|
������|
������|
���������|
�ﶫ��|
��ƽ��|
������|
������|
������|
������|
������|
���|
������|
������|
�����|
������|
������|
��³����|
�����|
������|
��Դ��|
������|
��˼��|
��ľ˹��|
������|
������|
��������|
������|
������|
������|
������|
�°Ͷ�����|
��׃�l�{(di��o)�ٿ���ϵ�y(t��ng)
������(sh��)�������M��,�����b���ɿɾ���߉������PLC��AD��D/A�D(zhu��n)�Qģ�K�ȽM��
��ؓ(f��)�d�����̖��Դ�ڸ��(q��)��(d��ng)Ƥ���C(j��)׃�l�������������̖21,Ӳ����D��Ҋ�D1
��
ú�V����Ƥ��ݔ�͙C(j��)ϵ�y(t��ng)�����p�LͲ�(q��)��(d��ng)����LͲ�(q��)��(d��ng),ÿ��(g��)�(q��)��(d��ng)�LͲ�Ɇ�һ��1�_(t��i)늙C(j��)�τ�(d��ng)��PLC�Ɍ�(sh��)�F(xi��n)����ƽ��
������(d��ng)��̖�o��
���ٶȿ����c�o�����c����������ͨӍ
����(sh��)��(j��)�ɼ��ͼ��صȹ�����׃�l�����й������\�༰�������\(y��n)�Р�B(t��i)����������������o�ٶȂ�����ʸ�����ơ��Ӝp�ٕr(sh��)�g��S������������{(di��o)�ȹ����c���c(di��n)������,׃�l��߀����PID�������x����/׃�l�D(zhu��n)�Qϵ�y(t��ng)��
���wӲ���M�ɞ�:�ٿ����b��:FX2N-32MT��X2N-4AD��FX2N-4DA;��׃�l��:ZJT-30�����汾��׃�l�{(di��o)���b�â�4;�۽�������늙C(j��):200kW×4��
ϵ�y(t��ng)���Ʒ���
(1)����ZT-30�����汾��׃�l����������ǰ��Ƥ��ݔ�͙C(j��)��4�_(t��i)����늙C(j��)�M(j��n)���(q��)��(d��ng)����,׃�l���Ɍ�(sh��)�F(xi��n)늙C(j��)��ܛ����(d��ng)�cܛͣ܇��
(2)�x�����˾��FX2Nϵ��PLC(FX2N32MT)��A/D��D/A(FX2N-4AD��FX2N-4DA)ģ�K�M�ɿ����b����ͨ�^��(d��ng)�B(t��i)ؓ(f��)���A(y��)�y��(sh��)�F(xi��n)Ƥ���C(j��)����(j��)ؓ(f��)�d�Ĵ�С�M(j��n)�Ќ�(sh��)�r(sh��)׃�l�{(di��o)��,ʹƤ���C(j��)�����ؓ(f��)�ɠ�B(t��i)�\(y��n)������PLCͨ�^A/Dģ�K���вɼ�������ǰ��Ƥ��ݔ�͙C(j��)4�_(t��i)�(q��)��(d��ng)늙C(j��)��ؓ(f��)�d�����̖(׃�l�{(di��o)���b�õ������̖),��(j��ng)����ܛ��̎����Ӌ(j��)���,��D/∧Aģ�Kݔ�������l����̖,����׃�l��������(y��ng)���l���(q��)��(d��ng)Ƥ��ݔ�͙C(j��),���Ƥ���\(y��n)ݔϵ�y(t��ng)���Ԅ�(d��ng)׃�l�{(di��o)�ٿ���������Ƥ���C(j��)���ܿ���ϵ�y(t��ng)�����\(y��n)����r��,��(d��ng)ؓ(f��)�d׃��r(sh��),Ƥ���C(j��)�ܿ�����\(y��n)��,�_(d��)���������ٶȺ�(w��n)���\(y��n)��;��(d��ng)ؓ(f��)�d׃С�r(sh��),Ƥ���C(j��)�ܿ�p��,�_(d��)���������ٶȺ�(w��n)���\(y��n)��;���d�r(sh��)Ƥ���C(j��)������D(zhu��n)���\(y��n)����
(3)ϵ�y(t��ng)�Ŀ��Ʋ��÷����������h(yu��n)�̿���,ͬ�r(sh��)����Ƥ�������@ʾ����(b��o)�����Ԅ�(d��ng)/�ք�(d��ng)�ГQ���(y��n)������,�ք�(d��ng)���Ʊ��C�������ڹ�����r�µ��\(y��n)��,�(y��n)�����܌�(sh��)�F(xi��n)�\(y��n)ݔ�C(j��)�ĵ����(y��n)����
(4)׃�l�{(di��o)���b�þ��оW(w��ng)�j(lu��)ͨӍ����,�Ɍ�(sh��)�F(xi��n)�h(yu��n)�̱O(ji��n)�y�c���ơ�
��һƪ���P(gu��n)�ڷe��ʽ�LͲݔ�͙C(j��)�ķ����c��(y��u)��
��һƪ��GZT�͝LͲݔ�͙C(j��)ϵ���O(sh��)Ӌ(j��)
���P(gu��n)��(bi��o)����
��һƪ��GZT�͝LͲݔ�͙C(j��)ϵ���O(sh��)Ӌ(j��)
���P(gu��n)��(bi��o)����
���P(gu��n)��
- Ƥ��ݔ�͙C(j��)˺�ѹ��ϼ�����o(h��)��ʩ����2018-11-15
- �LͲݔ�͙C(j��)�İl(f��)չ���F(xi��n)���о�������2018-11-15
- �LͲݔ�͙C(j��)�İl(f��)չ���F(xi��n)���о���һ��2018-11-15
- Ƥ��ݔ�͙C(j��)���w���ϷQ�ؽo��ϵ�y(t��ng)�O(sh��)Ӌ(j��)��̽2018-11-01
- Ħ��ʽ�e�ŝLͲݔ�͙C(j��)�b�õ��O(sh��)Ӌ(j��)2018-11-01
- �LͲݔ�͙C(j��)PLC���Ƽ��g(sh��)�ڿ��{(di��o)���a(ch��n)ϵ�y(t��ng)�еđ�(y��ng)��2018-11-01



- �P(gu��n)���҂�
- 朰�ݔ�͙C(j��)
-
Ƥ��ݔ�͙C(j��)
����Ƥ��ݔ�͙C(j��) �������_(t��i)Ƥ��ݔ�͙C(j��) ����Ƥ��ݔ�͙C(j��) ֱ����Ƥ��ݔ�͙C(j��) �D(zhu��n)��Ƥ��ݔ�͙C(j��)
-
�LͲݔ�͙C(j��)
��(d��ng)���LͲݔ�;��C(j��) �o��(d��ng)���LͲݔ�͙C(j��) ��sʽ�LͲݔ�͙C(j��) �LͲ�M��ݔ�;� �D(zhu��n)���LͲݔ�͙C(j��)
-
�}��(ch��)ϵ��
-
������

Copyright ��ICP��15019677̖-1 ���(qu��n)���� �Ϻ����Y�Ԅ�(d��ng)���O(sh��)������˾
